Dissecting the gradient descent method
This post is quite old, I wrote it for the first time in 2016 (!) and it passed through some revisions until it finally landed here in the Excursus section. It is slightly “mathsy”, it contains code and it assumes some general knowledge in statistical learning, but hopefully succeeds in giving you the gist without worrying about details if you’re not into them.
Gradient descent is a general mathematical optimisation method used to find a (local) minimum of a differentiable function. The idea is to follow the direction of the gradient (in 1-dimension, the derivative) as the most economical way to “descend” to a minimum.

In Machine Learning, this algorithm is used to minimise functions in the form of a sum
which measure the error between the real and the predicted representation of your data.
The errors which arise from the absence of facts are far more numerous and more durable than those which result from unsound reasoning respecting true data.
— Charles Babbage, “On the Economy of Machinery and Manufactures”
For instance, in a linear regression task with an ordinary least squares implementation the function to minimise is the sum of squared residuals between observed and predicted values, over all observations (n is the number of data points and we are assuming they live in a generic dimensional space, hence w and x are treated as vectors):
If for the sake of simplicity we think about this in 1 dimension,

we can easily visualise the residuals, that is, the (vertical) differences between prediction and observation - the goal of a good fit is to minimise the error as the sum of their squares.
In gradient descent, the gradient of the function (or the derivative in the 1-dimensional case) is used to identify the direction of maximum growth of the function, and a “descent” is implemented by updating the parameters iteratively as
The value multiplying the gradient is the learning rate, which is important to choose wisely: if it is too big it might get us past the minimum, trapping us in a zig-zagging motion across it; if it is too small it can slow down the computation because steps taken are tiny. In any case, for the algorithm to terminate, the iteration is set to stop once the difference between the current value of the parameter and the previous iteration’s one falls below a given precision threshold, chosen a priori.
Essentially, the idea is to do what’s illustrated in the very first picture above: making the green ball approach the minimum in steps.
What we described is the so-called “standard” gradient descent, which uses all observed data and for that is not the fastest possibility, we will see a speedier modification later.
Standard gradient descent: finding the minimum of a function
We will code this in Python, so to start with and follow through here, you need some imports:
import numpy as np
from scipy.spatial.distance import euclidean
from matplotlib import pyplot as pltNote: unfortunately the code editor of Substack is pretty basic, however there are people who managed to create workarounds for customisation. In any case, here’s a notebook with all the code presented here.
Suppose we want to use (standard) gradient descent to minimise a function in the form of a paraboloid (2-dimensional) with minimum in the origin:
the vector field at the minimum created by its gradient is graphically represented in the next image (with scaled vector lengths).
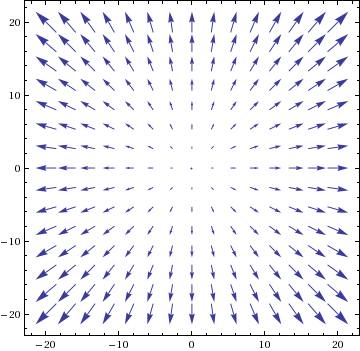
The gradient vector field is giving us the direction of growth of the paraboloid, so descending along will lead us towards the desired minimum.
Minimising a 1D parabola with standard gradient descent
Let’s code a gradient descent towards the minimum of a 1-dimensional parabola starting from x=7 and with a learning rate of 0.1. The computation is stopped when the difference between the iteration updates goes below a threshold value set to 0.0001. Let’s define the parabola and its derivative, plotting both.
# Choose the x points
x = np.array([i for i in range(-1000, 1000)])
# Define the function and its derivative
def f1(x):
return 3*x**2 - 10*x + 4
def f1_der(x):
return 6*x - 10
# Plot the functions
plt.ylim(-10,100)
plt.xlim(-10,10)
plt.plot(x, f1(x), label='$f$', lw=3)
plt.plot(x, f1_der(x), label="$f'$", lw=3)
plt.legend(loc=2)
plt.xlabel('$x$')
plt.show()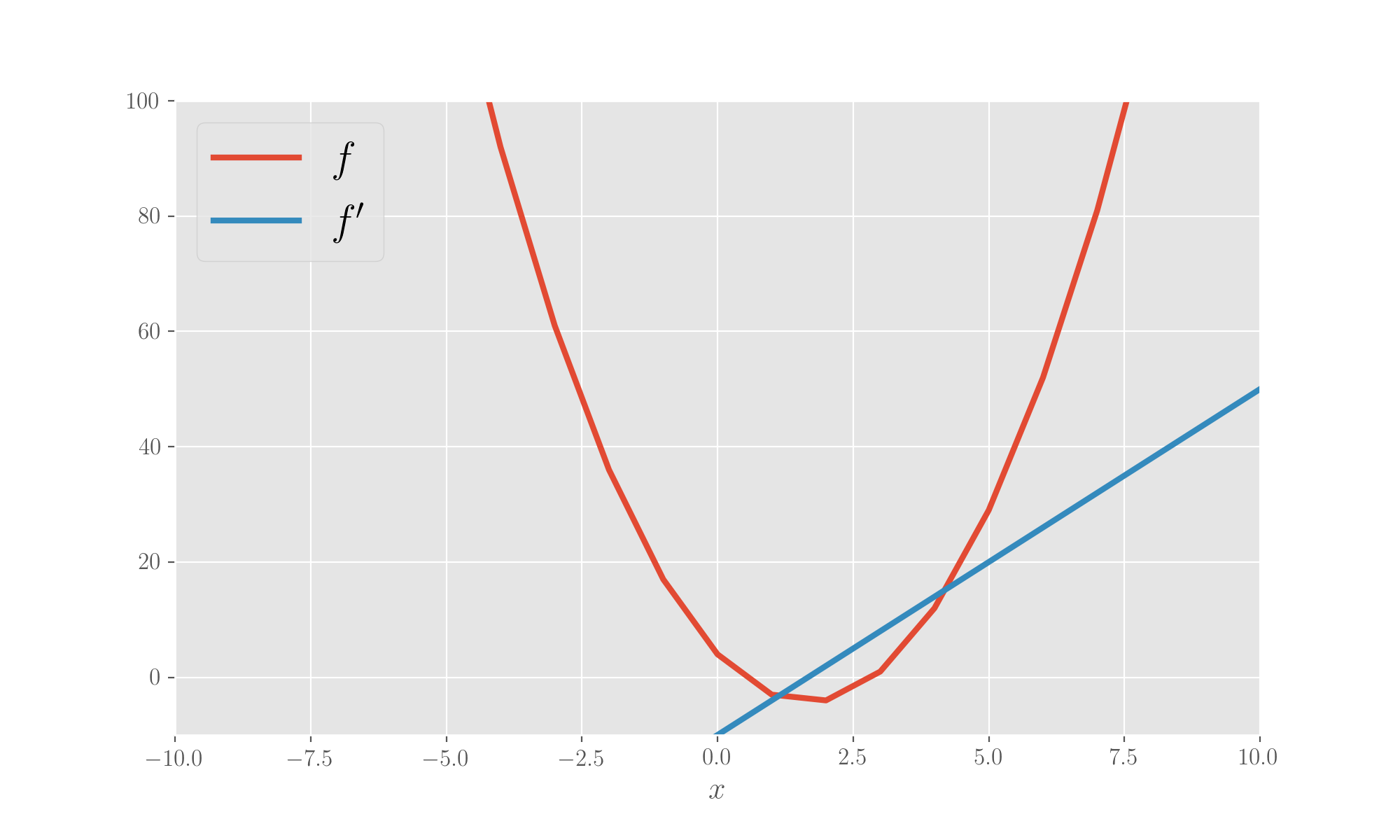
Then we implement a gradient descent with a chosen learning rate and starting point.
# Running the gradient descent
x0 = 7 # starting point for the descent
alpha = .1 # step size (learning rate)
p = .0001 # chosen precision
former_min = x0
iterative_mins = [former_min]
while True:
x_min = former_min - alpha * f1_der(former_min)
iterative_mins.append(x_min)
if abs(former_min - x_min) <= p:
break
else:
former_min = x_min
print('Local min of function is %f' %x_min)This finds the minimum at 1.67. We can plot the iterations:
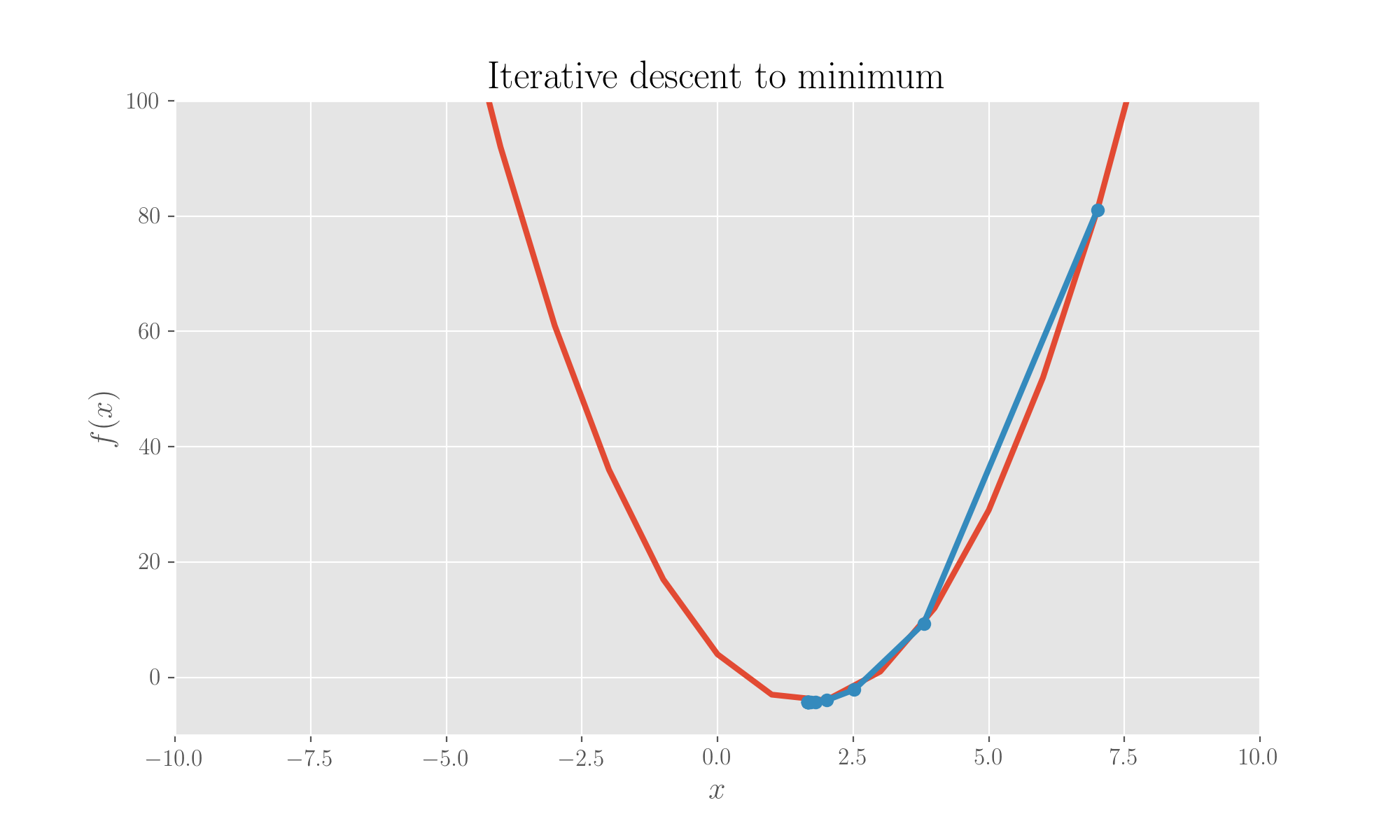
This is pretty satisfactory given that the analytical minimum is exactly at 10/6=1.67.
Minimising a 2D parabola with standard gradient descent
We can do the same but for a paraboloid in 2 dimensions.
# Function and derivative definitions
def f2(x, y):
return x**2 + y**2
def f2_der(x, y):
return np.array([2*x, 2*y])#Running the gradient descent
x0 = 50 # starting point for the descent
y0 = 50 # starting point for the descent
alpha = .1 # step size (learning rate)
p = .0001 # chosen precision
former_min = np.array([x0, y0])
iterative_mins = [former_min]
while True:
x_min = former_min - alpha * f2_der(former_min[0], former_min[1])
iterative_mins.append(x_min)
if abs(former_min[0] - x_min[0]) <= p and abs(former_min[1] - x_min[1]) <= p:
break
else:
former_min = x_min
print('Local min of function is', x_min)which yields a local minimum of (0.00037, 0.00037).
Standard gradient descent: linear regression
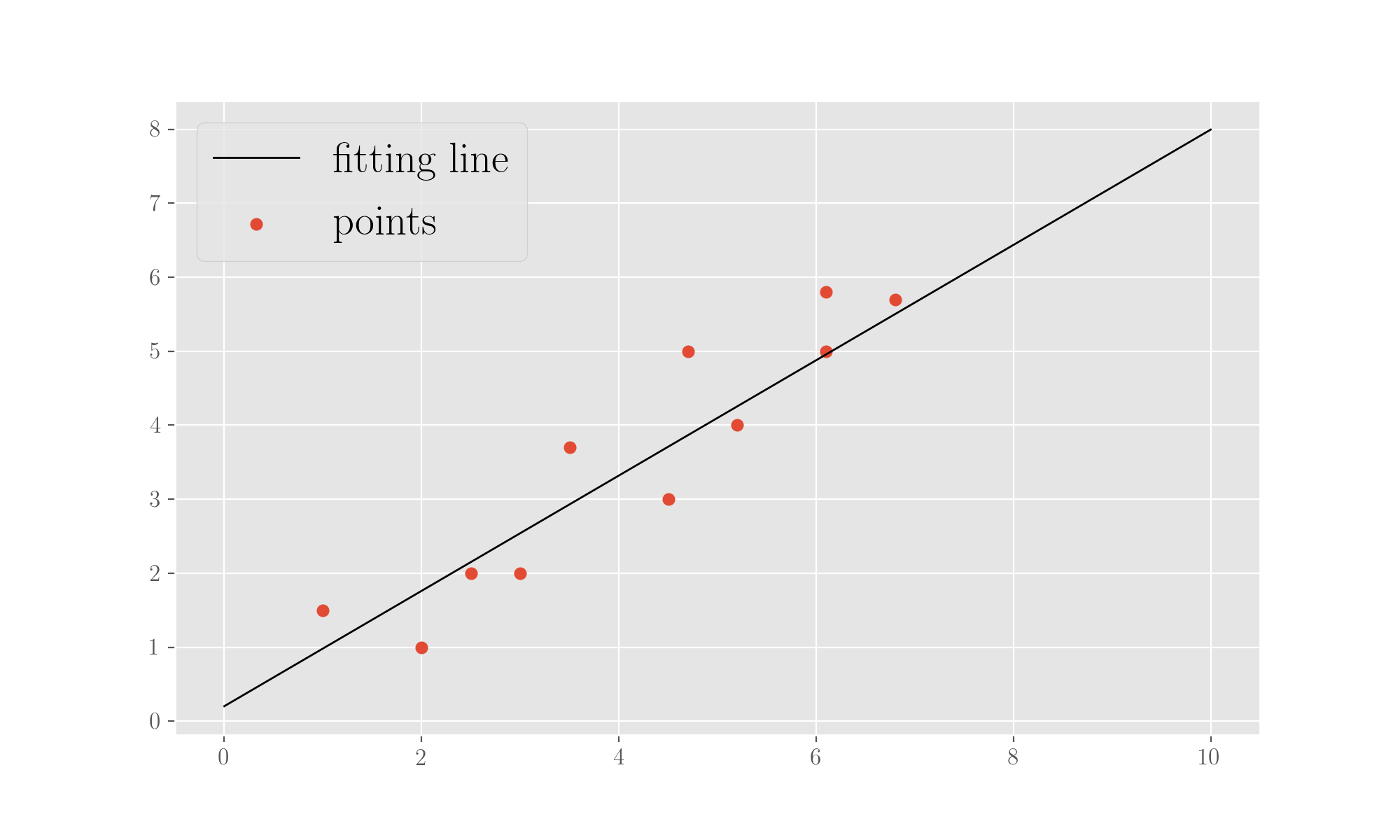
As we said, this method is used in an ordinary least squares calculation for a linear regression to find the line which best fits a bunch of observation points. Let's "manually" implement it.
Let's say that we have some experimental data points, and we calculate the objective function for a linear regression (the error):
# The experimental points (observations)
x = np.array([1, 2, 2.5, 3, 3.5, 4.5, 4.7, 5.2, 6.1, 6.1, 6.8])
y = np.array([1.5, 1, 2, 2, 3.7, 3, 5, 4, 5.8, 5, 5.7])
alpha = 0.001 # learning rate
p = .001 # precision
def f(x, w):
"""A line y = wx, to be intended as w0 + w1x (x0 = 1)"""
return np.dot(x, w)
def diff(a, b):
return a - b
def squared_diff(a, b):
return (a - b)**2
def obj_f(w, x, y):
"""The objective function: sum of squared diffs between observations and line predictions"""
return sum([squared_diff(f(np.array([1, x[i]]), w), y[i]) for i in range(len(x))])Then we perform a linear regression via minimising it:
def obj_f_der(w, x, y):
"""Gradient of the objective function in the parameters"""
return sum([np.dot(2 * np.array([1, x[i]]), diff(f(np.array([1, x[i]]), w), y[i])) for i in range(len(x))])
# Perform a standard gradient descent to get the parameters of the fitting line
former_w = np.array([10, 5]) # the chosen starting point for the descent
while True:
w = former_w - alpha * obj_f_der(former_w, x, y)
if euclidean(former_w, w) <= p:
break
else:
former_w = w
print('Found parameters (intercept, slope):', w)The regression finds parameters 0.27 for the intercept and 0.80 for the slope of the fitting line, so we can plot the line alongside the points:
plt.scatter(x, y, marker='o', label='points')
plt.plot([i for i in range(0,11)], [w[0] + w[1] * i for i in range(0, 11)], label='fitting line', c='k', lw=1)
plt.legend(loc=2)
plt.show();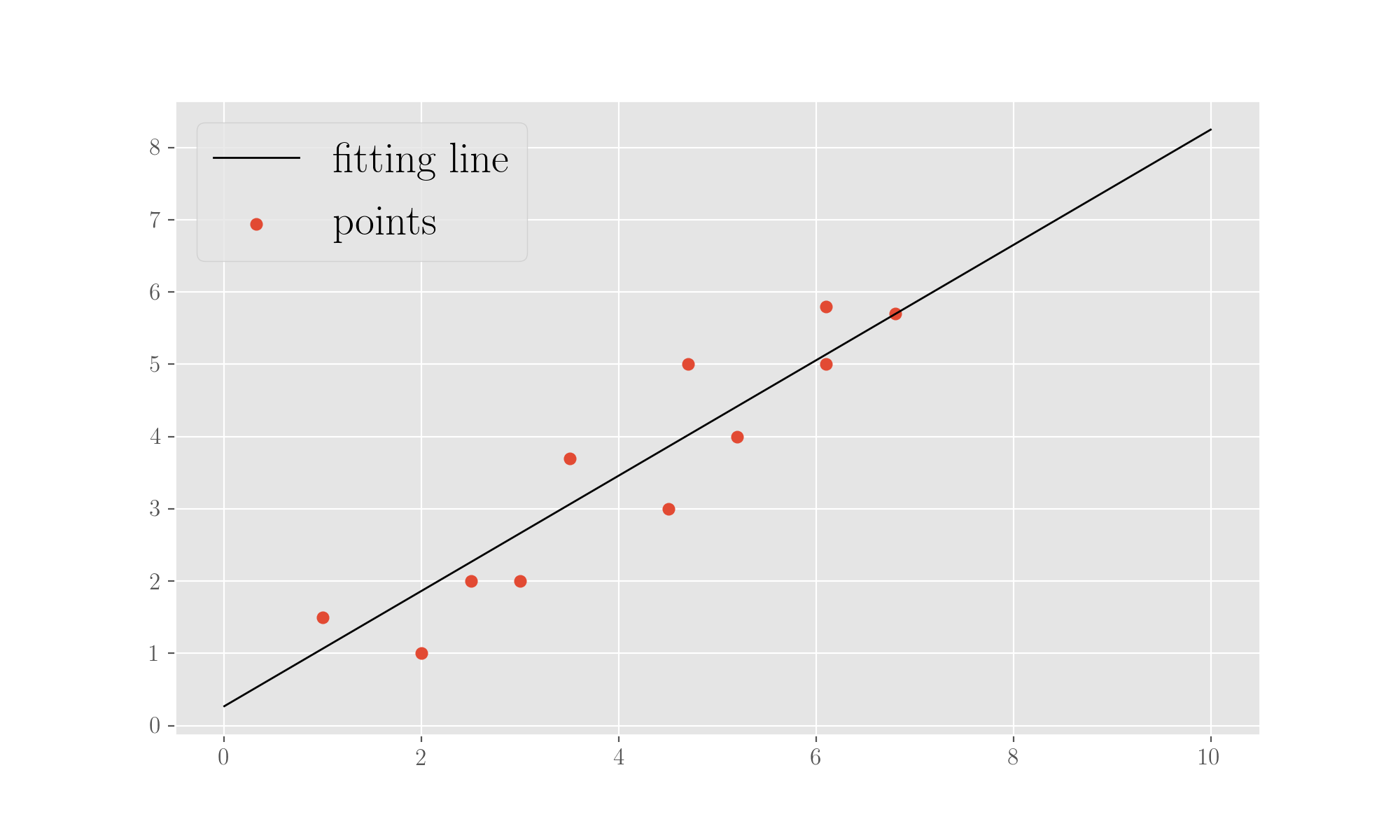
Stochastic gradient descent
The stochastic version of gradient descent does not use all points at each iteration to calculate the gradient of the function but picks only one point. The point update of the parameters looks like
A for loop across i passes this rule across all observations in the training set, which has been randomly shuffled (epoch), until the updated parameter does not change by more than a chosen precision.
The stochastic version of gradient descent is particularly useful for large datasets where the standard updating rule might be too slow to compute due to the sum on all observations (and remember that gradient encompasses derivatives in every dimension). If instead we calculate the gradient only on one point at a time on a randomly shuffled version of the dataset, we have a significant save in computation.
Minimising an objective function for linear regression with stochastic gradient descent
Using the same dataset, same learning rate and same precision as above, we re-implement the descent, this time using the stochastic rule
def obj_f_der_point(w, obs_x, obs_y):
"""Addend of the gradient of the objective function in the parameters"""
return np.dot(2 * np.array([1, obs_x]), diff(f(np.array([1, obs_x]), w), obs_y))
# Perform a stochastic gradient descent
training_set = [(x[i], y[i]) for i in range(len(x))]
epoch = 1
former_w = np.array([10, 5]) # chosen start for the descent
found = False
max_epochs = 2000
while epoch < max_epochs:
random.shuffle(training_set)
for point in training_set:
w = former_w - alpha * obj_f_der_point(former_w, point[0], point[1])
if euclidean(former_w, w) <= p:
break
else:
former_w = w
epoch +=1
print(epoch)
print('Found parameters (intercept, slope):', w)This procedure, which uses 2000 epochs, finds parameters 0.23 for the intercept and 0.80 for the slope (compare to above where we had 0.27 for the intercept).
📚References & read more
I’ve put the code reported here in a Jupyter notebook
Some more reading on the scikit-learn documentation, focused on usage
Add a comment: